project05:Prototype
(→plan) |
(→plan) |
||
| Line 104: | Line 104: | ||
[[File:GergoteunSectionwarehouse.jpg |800px]] | [[File:GergoteunSectionwarehouse.jpg |800px]] | ||
| − | [[File:gergoteunCADCONCEPT.jpg| | + | [[File:gergoteunCADCONCEPT.jpg|600px]] |
Revision as of 11:30, 10 May 2012

Contents |









programme

Merging the programs of MEDIALAB and Creative-Corporate Collaboration a common goal can be found in both initiatives. The interest lies in activating different target groups who usually spend most of their time passively and are not very aqcuinted to making things with their hands.
MEDIALAB takes away childeren from behind the television and puts them in an environment of creation, as does CCC that introduces corporate workers to industries of creation, rather than industries of sitting behind a desk looking at a monitor.
The mechanism of the project 'Factory' is: Physical- and virtual trash is taken as an input for the process, which then recycles the trash to form new meanings and values. Creativity is used in this process to upcycle input of low quality to a higher level.
connections

qualities
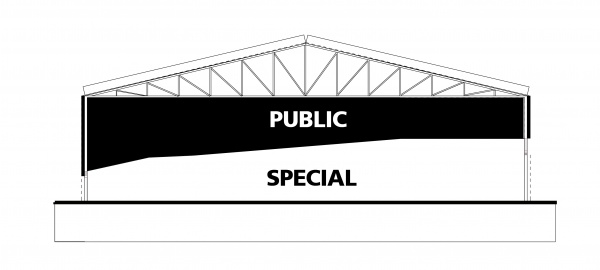
 Definition of existing and desired spatial qualities in the warehouse
Definition of existing and desired spatial qualities in the warehouse

m2shaper

To shape the spaces in the warehouse and play around with the floor plan in an interactive way a self-developed tool for creating areas with a pre-defined number of m2 was used.

This grasshopper definition takes a spreadsheet file (.csv) and creates the necesary space within an adjustable created shape in Rhino. Upon adjusting the shapes to fit in a specific architectonic idea of a floor plan, the definition ensures the m2 from the programme are still included.

landshaper
After initial thoughts on the prototype a decision has been made to work on prototypes that will investigate the spatial relations between different volumes (programme) in the warehouse. As defined as a desired quality the architecture in the warehouse should allow for a continuous, flowing landscape that will encourage the users to walk around and interact. The prototype will research the relation between placement of volumes, continuous surface and the architectonic qualities that are generated in this process.

An experiment with series of models is trying to separate functions without breaking the continuity of space.

A homogenous landscape-like intervention would keep the spatial broadness of the warehouse.

During the modelling process unexpected spatial connections occur, which serve as inspiration for the evolution of the design.

After an investigation into the spatial sketches the findings need to be examined from the aspect of functional needs. Further models are to come.



configurator
After experimenting with the m2shaper and introducing an organizing pattern (inspired on a voronoi pattern with random nucleus points to allow for non-hierarchical sequence of spaces), we decided the ground floor should not be defined as one optimum arrangement of spaces, but rather a few cores (fablab, mediaspace, classroom, etc) and a lot of cells around it which can be open, closed, single or joined to other cells.
To be able to do this, a system of dynamic separating membrames must be introduced. These membrames - or walls - can be moved around the cells exteriors and form a barrier. However, because of the sloping roof landscape, these membrames sometimes bend because of the landscape overhead sloping down. At the point of bending the membrame can choose to bend in our outward.


The grasshopper definition written to simulate the bending of the membrame takes some points (defined by the cell exterior lines) and detects wether the desired membrame height (controlled with a slider) can be fitted under the roof landscape.


plan

File:GergoteunCADVARIATIONS.pdf